Смартфон управляет игрушечным автомобилем
За прошедшее десятилетие у многих появилось один два смартфона лежащих без дела, так и у меня. Решил применить смартфон для управления чем-нибудь, ну например, автомобилем.
Для начала выбрал игрушечный автомобиль из Лего. Он может двигаться вперед и назад, поворачивать вправо и влево и имеет пульт ДУ c ИК лучами. В качестве драйвера двигателей машинки используется микросхема LB1836, которая имеет четыре информационных входа. In1, In2 — управляют ходовым двигателем, In3, In4 — управляют приводом руля, по схеме 0, 0 или 1, 1 — нерабочее состояние. 0, 1 или 1, 0 — вращение двигателя в одну или другую сторону.
Логические 0 и 1 на входах формирует приемник ИК лучей игрушки при получении сигналов от ДУ.
Я для передачи сигналов от смартфона к машинке решил использовать экран смартфона, поскольку другие каналы передачи технически сложные и дорогие в реализации. К входам микросхемы LB1836 я решил подсоединить свое устройство, которое будет получать сигналы от смартфона.
Схема передачи сигналов такая. Программа в смартфоне создает световые пятна заданной продолжительности на экране, устройство их регистрирует и формирует логические 0 и 1 той же продолжительности на входах LB1836 без какой либо логической обработки, что очень упрощает конструкцию устройства. То есть, я просто подменил приемник ИК лучей своим устройством.
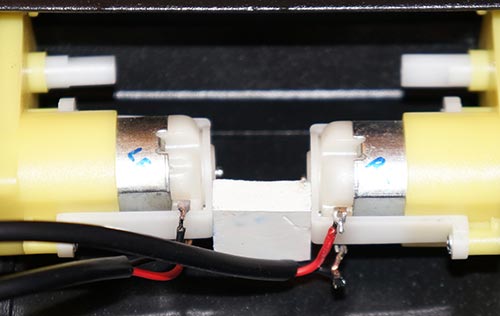
Устройство приема световых сигналов состоит из 4 ячеек. Каждая ячейка представляет собой фототранзистор L-3DP3C KGB подсоединенный к усилителю на npn транзисторе KT315. Питание берется с управляемой машинки. Выход, как я уже говорил, подсоединяется к соответствующему входу драйвера двигателя. Маломощные двигатели могут питаться прямо от выхода, но вращаться будут только в одну сторону. Но зато их будет четыре!

О выборе элементов устройства могу сказать следующее. Транзисторы я взял те, какие у меня были с давних времен. Фототранзисторы купил те, что были в магазине. Так что, желающие повторить схему, не тратьте время на поиски, воспользуйтесь теми элементами, что вам доступны. Кстати, вначале я усилитель собрал на микросхеме LM 324N с четырьмя операционными усилителями. Тоже хорошо работает, но мне показались его габариты слишком большими.
Устройство собрал на картонке, используя полоски медной фольги и элементы конструктора Лего.

Фототранзисторы помещены на дно световых колодцев диаметром 5мм и глубиной 9 мм, что бы исключить боковое засвечивание. В световые колодцы вставлены металлизированные плёнки, свёрнутые в трубочку, что значительно повышает чувствительность фототранзисторов, за счет увеличения светового потока.

Вот такой получился автомобиль.

Для разработки программы я взял, приложение BASIC! из Googl Play Маркет. Это приложение позволяет писать программы для Android, создавать файлы apk и работать со всеми сенсорами и устройствами смартфона.
В программе используется управление голосом как наиболее целесообразное в моем случае. Объект TTS преобразует текст в речь. Объект STT преобразует речь в текст. При работе STT обязательно должен быть включен Wi Fi, потому что записанная фонограмма отправляется на сервер в интернете, откуда приходит результат распознавания, это несколько слов, или фраз. Программа проверяет, есть ли команда в списке, выводит команду на экран и выполняет её. Если текст не распознан программа выводит сообщение об этом. Все это повторяется в бесконечном цикле. Завершение работы программы производится командой «стоп» или нажатием клавиши возврат. Геометрические размеры взяты относительными, чтобы автоматизировать привязку на разных экранах с разными размерами и разрешением, что не всегда получается. Круги, которые рисуются на экране, являются объектами и номеруются автоматически по мере их создания.
Команда GR.SHOW 2 — означает показать круг, который был создан вторым. Его номер содержится в n4. Можно было написать GR.SHOW n4. В строке IF (theText$=«вперед») THEN kom$=«вперёд» вы заметите различие в значениях величины в команде присваивания — «вперед» и «вперёд». Дело в том, что STT упорно возвращает «вперед», хотя бывают случаи «вперёд», тогда программа не распознает команду. От этого можно было избавиться, но я не стал усложнять программу, а просто поправил написание при выводе на экран. Еще бывают сбои при распознавании команды «влево». Впрочем, возможно это особенности моего произношения.
К сожалению, я не могу вставить сюда клип показывающий работу программы.
Посмотрите здесь.
Управление RC машинкой 27mhz с компьютера
Накопилось у меня некоторое количество радиоуправляемых игрушек, из тех, которые покупать своим двум детям нельзя: один пульт управляет всем в округе, никакого разделения ни по частотам, ни по кодам. Одновременно играть не получится. У меня эти игрушки работают на частоте 27mhz, но аналогичные могут работать на частотах 35, 40, 49 mhz по тому же простейшему протоколу, о котором и пойдет речь дальше.
Мне пришла мысль заменить пульт управления игрушки компьютером. Основой для подобных мыслей послужил вот этот пост.
Моя идея заключалась в том, чтобы сделать USB девайс, на который можно передавать с компьютера коды команд, а это устройство каждую команду закодирует и выдаст в эфир RC-машинке.
Список кодов комманд
Мое оборудование использовало следующий набор команд:
Forward/Left: 28 pulses
Forward/Right: 34 pulses
Reverse/Left: 52 pulses
Reverse/Right: 46 pulses
Но было несколько пультов на 27 mhz, которые не работали или работали не корректно с моими игрушками. В интернетах я нашел другой набор команд для подобного оборудования (возможно, для другого набора микросхем, не разбирался).
Forward/Left: 28 pulses
Forward/Right: 34 pulses
Reverse/Left: 52 pulses
Reverse/Right: 46 pulses
Итак, я набросал код на C++ для микроконтроллера Atmel AVR Attiny 2313 чтобы убедиться, что эта логика работает. Выходной пин микроконтроллера я подключил к выходному каскаду пульта игрушки чтобы не собирать радиочастотную схему самостоятельно. Эту точку легко найти по пину 8 микросхемы TX-2: именно он является выходом закодированных импульсов нужной длины, которые подаются в этот каскад. Тут можно было бы даже просто взять ножовку и выпилить все кнопки вместе с микросхемой TX-2, но они для подобных экспериментов не мешают поэтому оставил как есть.

Связь с компьютером через USB
Для связи с компьютером я использовал библиотеку vusb, набросав на универсальной плате обвес по следующей схеме:

Получился вот такой девайс:

Отладка
Код я написал, но вот работать как нужно он отказался. Для отладки пришлось задействовать запылившийся Saleae Logic Analyser. Так я смог заставить соответствовать длины импульсов с моего контроллера тому, что выдавала микросхема TX-2 и тогда все прекрасно заработало.

На фото можно увидеть визуально как кодируется сигнал «вперед», который имеет в своем теле 10 импульсов:
4 длинных импульса заголовок: каждый
1.3ms высокий уровень and
0.5ms низкий уровень сигнала с 75% заполнением:
10 коротких импульсов: каждый 0.5ms высокий and 0.5ms низкий.
В случае передачи другого кода заголовок остается тем же, а 10 коротких импульсов заменяются на соответствующее другому коду количество.
Код на C++
Для компьютера я сделал программу, которая в цикле читает клавиатуру, кодирует и передает в USB контроллеру. Исходные коды для микроконтроллера и для PC я выложил в общий доступ. Компилировал используя gcc на Linux Gentoo, на Windows не проверял.
Как изменить частоту радиоуправляемой машинки?
Дата: 28.03.2016 // 0 Комментариев

Иногда самый безобидный подарок маленькому ребенку может его очень огорчить. Купив машинку на радиоуправлении, многие не задумываются, что большинство подобных игрушек работают на одной и той же частоте. И если дите уже имеет подобную игрушку, то может случиться небольшой казус, машинка будет реагировать на не родной пульт. Если же в семье два ребенка и частота радиоуправляемых машинок совпадает, то постоянные истерики будут гарантированны. Возникает встречный вопрос, как сменить частоту в пульте и модели на китайских машинках на радиоуправлении? Сегодня мы постараемся решить подобную проблему и расскажем, как изменить частоту радиоуправляемой машинки.
Как изменить частоту радиоуправляемой машинки?
Перед перестройкой частоты необходимо сделать три вещи:
Перестройка частоты китайской машинки без специального оборудования дело тонкое и потребует терпения и немного времени. Первым делом вскрываем радиоуправляемую машинку и находим на плате катушку залитую воском или парафином.

Аккуратно иголкой удаляем воск. Далее фиксируем в нажатом состоянии одну из кнопок на пульте управления, например «ВПЕРЕД». Выкручивая (или вкручивая) керамической отверткой сердечник катушки мы будем изменять рабочую частоту нашей модели.
Выкручиваем сердечник до того момента, когда машинка перестанет реагировать на сигналы рядом находящегося пульта.
 Далее займемся сменой частоты на пульте. Вскрываем пульт и находим аналогичную катушку.
Далее займемся сменой частоты на пульте. Вскрываем пульт и находим аналогичную катушку.

Фиксируем кнопку «ВПЕРЕД» и очень плавно выкручиваем сердечник катушки пульта до того момента, когда машинка среагирует на сигнал пульта. Дальше немного отходим от машинки на расстояние 3-5 м. Скорей всего сейчас машинка на таком расстоянии не будет реагировать на пульт, продолжаем очень медленно выкручивать сердечник.
Добиваемся устойчивой работы на расстоянии 3-5м, аналогичным образом постепенно увеличиваем дистанцию до 20м. Когда машинка устойчиво работает на дистанции 20м, заливаем катушку на плате машинки силиконом. И собираем модель.
 Подстройку всех катушек проводим очень плавно, на сердечник не стоить давить т.к. пластик катушки очень мягкий и сердечник может с легкостью провалиться внутрь.
Подстройку всех катушек проводим очень плавно, на сердечник не стоить давить т.к. пластик катушки очень мягкий и сердечник может с легкостью провалиться внутрь.
На этом смена частоты радиоуправляемой машинки кончена. Необходимо учесть, что таким способом вряд ли получиться подстроить более одной пары машинок.
Демонстрация работы
После приобретения недорогого 7″ китайского планшета и экспериментами с взаимодействием с Arduino по USB и Bluetooth захотелось сделать что-то более серьезное и полезное для своих детей. Так родилась идея сделать машинку с управлением от акселерометра Android-устройства и связи по Bluetooth каналу. До этого я никогда не увлекался робототехникой или РУ управлением, но желание было. Были поставлены три цели:
Данные обрабатываются и передаются по Bluetooth каналу на контроллер машинки, который в свою очередь через драйвер двигателей управляет моторчиками машинки.
Компоненты
1. Android устройство
2. Шасси для машинки
Также понадобится любое шасси с 2-мя или 4-мя моторчиками. Это может быть как шасси для DIY проектов, так и шасси от старой б/у радиоуправляемой машинки.
Я купил готовое шасси на eBay. Кто еще не знаком с интернет-аукционом eBay, рекомендую для прочтения эту статью: покупка радиодеталей на eBay. Гарантирую, что сэкономите немало денег покупая там, а не здесь у перекупов. Также, можно воспользоваться и другими китайскими магазинами: www.aliexpress.com, dx.com и др. Найти шасси довольно легко, достаточно в поисковую строку вбить одно из словосочетаний: Robot chassis, Robot platform, DIY Car chassis и др. Стоимость варьируется от 20$ до 60$.

При выборе шасси обращайте внимание на питание и мощность двигателей, а также на обороты моторчиков и наличие редуктора. Хотя большинство платформ содержат стандартный 6В моторчик с редуктором.
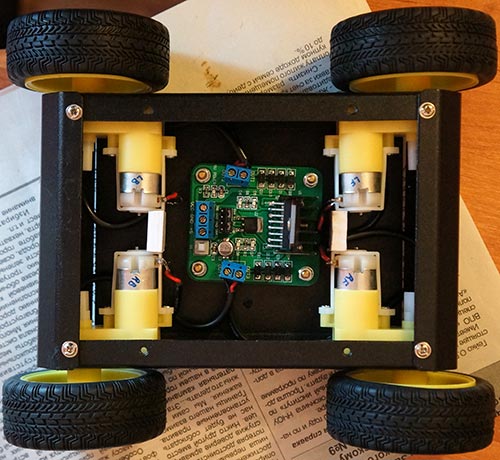
Для принципа управления описанного в данном проекте, больше всего подходит гусеничная платформа, но т.к. у меня пока что ее нет, я реализовал проект на основе 4WD платформы.
3. Контроллер машинки
Как я уже говорил, проект планируется сделать мультиплатформенным. На текущий момент проект CxemCAR реализован для следующих аппаратных платформ:
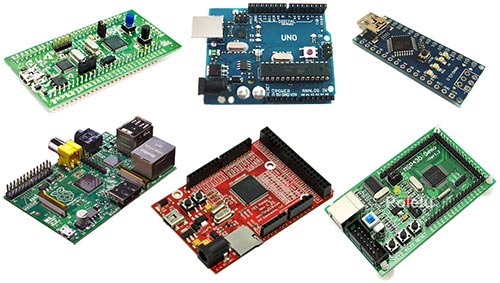
«Мозги» робота не требовательны к быстродействию МК и количеству периферии, необходимый минимум, который должен поддерживать микроконтроллер: 2 ШИМ и UART.
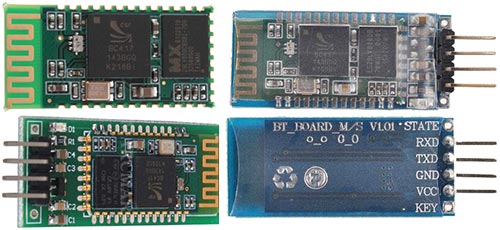
4. Bluetooth модуль
В качестве Bluetooth модуля использован дешевый китайский UART модуль HC-06. Подойдут модули вида HC-03, HC-04, HC-05, HC-06, да и вообще любые Serial Bluetooth. Лучше брать с готовыми штыревыми выводами, чтобы не пришлось паять, т.к. расстояние между выводами очень маленькое (см. 1-ой на фото внизу). Стоимость такого модуля на eBay составляет в среднем 5-10$.
Bluetooth модули и работа с ними применительно к Arduino, неплохо описаны в этой статье. Для других контроллеров все практически тоже самое, вот к примеру статья с описанием связи по Bluetooth между STM32 и Android.
5. Драйвер двигателя
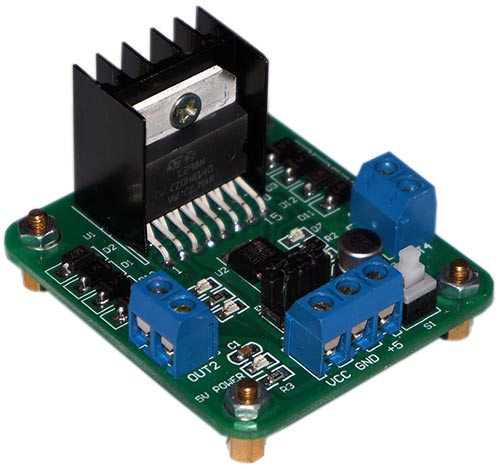
В качестве драйвера я использовал специализированную микросхему L298N, которая представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. На eBay продаются готовые платы со всей необходимой обвязкой, цена платы составляет 4-5$ и выглядит она приблизительно так:
Подключение к Arduino достаточно подробно описано в этой статье. В нашем проекте для плавного изменения скорости вращения двигателей, мы будем использовать ШИМ (широтно-импульсную модуляцию).
6. Остальные комплектующие
Помимо вышеперечисленных компонентов понадобятся:
— батарейный отсек (4-5 батареек АА) или аккумуляторы, можно использовать к примеру готовые блоки Li-Po аккумуляторов на 7.4В
— соединительные провода
— выключатель питания
— термоусадочная трубка, хомуты и др.
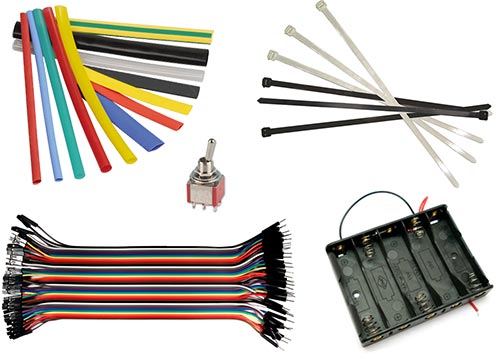
Все это конечно опционально и можно заменить тем, что есть под рукой, к примеру вместо термоусадки использовать изоленту и т.д.
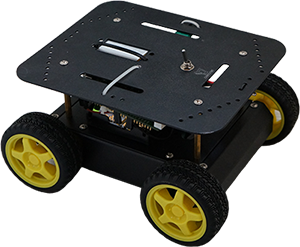
Как видите, себестоимость машинки не так уж и велика, если использовать свое шасси с моторчиками, то выходит около 20-25$ на все, если покупать и шасси, то выйдет уже 45-60$ в зависимости от типа шасси (т.к. диапазон цен на них очень широк).
Вот, что получилось у меня:
Принцип работы
L255\rR-255\r
По данной команде левый двигатель будет вращаться вперед, а правый назад, что заставит машинку вращаться вокруг своей оси против часовой стрелки.
H1\r
Команда включения дополнительного канала, к которому например можно подключить фары, звуковой сигнал и т.п. В качестве примера, приведен только один дополнитльный канал, однако ПО легко модифицировать, чтобы задействовать большее количество дополнительных каналов.
Символы команд L, R и H можно задавать в настройках Android-приложения.
Электронная начинка
Структурная схема CxemCAR представлена ниже:
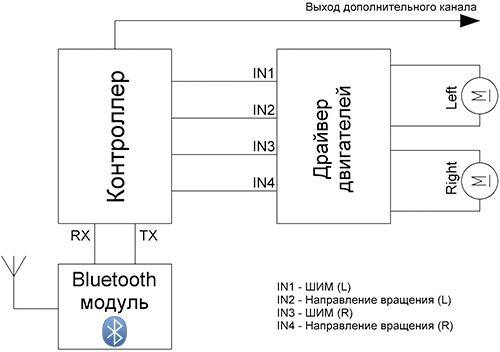
Как видим, к контроллеру (Arduino, STM32 и др. неважно какой) подключается Bluetooth модуль и драйвер двигателей, к которому в свою очередь подключается 2 или 4 моторчика Bluetooth-управляемой модели. На схеме изображен один выход дополнительного канала (включение звукового сигнала, фар и т.п.), но путем небольшой правки программы число дополнительных каналов может быть легко увеличено.
Работа с Android приложением
Приложение под Android писалось в среде Eclipse. Все исходники проекта и проект для Eclipse вы можете скачать ниже. Я не специалист в Java программировании и это мое первое приложение под Android поэтому кое-где код не совсем удачен. Именно на разработку Android приложения ушло основное время при разработке данного проекта. Версия Android должна быть не ниже 3.0, я все писал и тестировал под планшет с версией 4.0.3.
Приложение содержит несколько активити. Главное активити представляет собой начальный экран с кнопками запуска различных режимов управления и настройками:
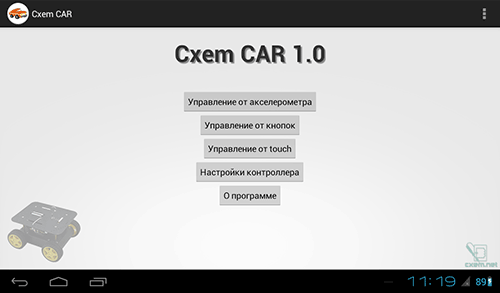
Предусмотрено 3 режима управления Bluetooth-моделью:
Настройки приложения
Скриншот настроек Android приложения CxemCar версии 1.0:
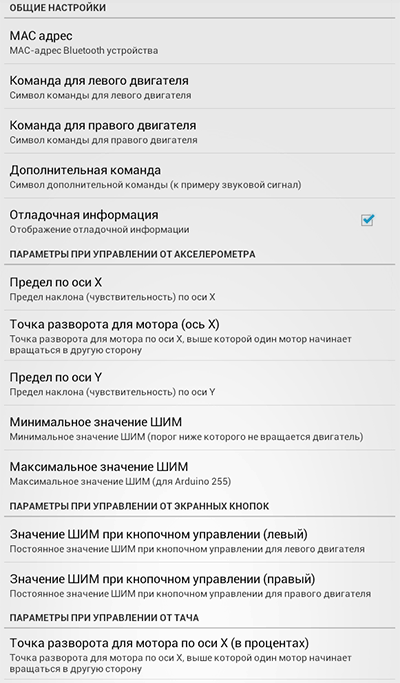
К каждой настройке внизу есть небольшое пояснение, поэтому с их предназначением думаю не должно возникнуть вопросов. Однако на некоторых из них хотелось бы остановиться более подробно.
Точка разворота для мотора (ось X)
При наклоне Android-устройства влево или вправо программа притормаживает тот двигатель, в сторону которого наклонено устройство, т.о. осуществляется поворот. Однако, когда значение наклона доходит до заданной в настройках точки разворота, то двигатель начинает вращаться в другую сторону. Если наклонить устройство максимально вбок, то один двигатель будет вращаться с максимальной скоростью в одну сторону, а другой в другую и соответственно машинка будет крутиться вокруг своей оси на месте.
MAC адрес
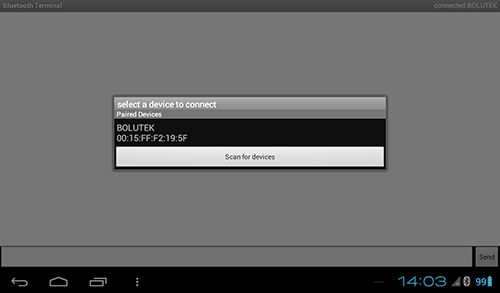
Этот MAC-адрес и необходимо прописать в настройках приложения CxemCAR.
Само ПО под Android я не буду расписывать, т.к. оно довольно таки громоздкое и поэтому если у вас возникнут какие-либо вопросы по нему, то обращайтесь тему поддержки данного проекта на форуме.
Сборка платформы

Как я уже говорил выше, в качестве платформы я выбрал шасси Pirate-4WD от производителя DFRobot (SKU:ROB0003). Это одно из самых популярных шасси, вот его описание и видео по сборке. Хотя там все интуитивно понятно и сборка очень проста.
После того, как была собрана основа шасси с моторами, припаиваем провода и на всякий случай маркируем моторчики:
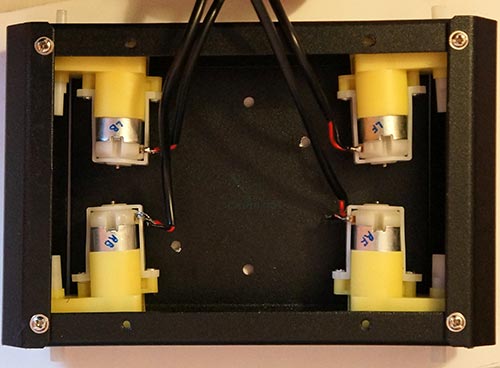
На верхнем фото хорошо видно, что левые и правые двигатели относительно друг-друга расположены несоосно из-за непродуманности китайской конструкции, и из-за этого колеса немного проскальзывали при движении. Поэтому потребовалось небольшая доработка, для этого я вырезал распорки из пластика и вставил их между двигателями.
Стало немного лучше, но все равно остался небольшой градус у колес. Однако, как показали дальнейшие испытания, это не сильно влияло на ходовые качества платформы. Поэтому не стал углубляться в доработку шасси и оставил как есть с распорками.
Следующим этапом является установка колес. На вал они налезают очень туго, кое-где даже пришлось подпилить каттэром.
Провода от 4-х моторов подключаем к плате драйвера двигателей L298N, левые 2 мотора просто запаралеленны, тоже самое и правые.
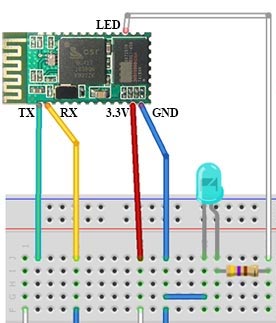
Для того, чтобы можно было видеть состояние Bluetooth соединения, у модуля HC-06 (да и у других тоже) присутствует возможность подключения светодиода состояния. Я решил его также подключить и вывести на видное место. Для этого, я использовал токоограничительный резистор номиналом 470 Ом и термоусадочную трубку.

К модулю Bluetooth подключаем или подпаиваем все необходимые провода, помимо светодиода это питание, GND, TX и RX. Смотрите документацию на ваш Bluetooth модуль. Чтобы не мучаться с пайкой, я вам советую сразу взять модуль с подпаянными штыревыми выводами (см. фото выше). И лучше брать модули HC-03/HC-05.
Я же использовал модуль HC-06, который у меня был до этого. Схема распайки следующая:
В распаянном виде модуль выглядит так:
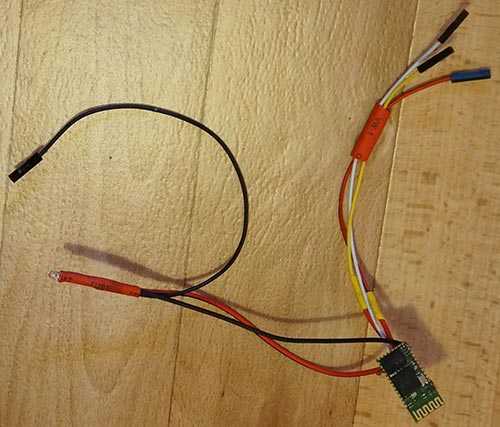
Его я также разместил в термоусадочной трубке большого диаметра.
Для питания двигателей я использовал батарейный отсек на 5 элементов типа АА, т.е. напряжение питания двигателей составило 7.5 Вольт. Можно использовать LiPo и другие аккумуляторы. Для крепления батарейного отсека в крышке шасси просверлил два отверстия и закрепил при помощи двух болтов.

Магазин
радиоуправляемых
моделей

Доставка товаров проводится по всей территории Украины
Новой почтой, Интаймом и Укрпочтой

Доставка курьером и самовывоз — из магазинов в Киеве и Харькове

Техника и комплектующие
Техника
Комплектующие
Производители
Весь каталог
10 причин
покупать у нас
Как подобрать пульт к радиоуправляемой машине?
Как подобрать пульт к радиоуправляемой машине?
Как подобрать пульт к радиоуправляемой машине?

Накануне ответственных соревнований, перед окончанием сборки Kit комплекта автомобиля, после аварий, в момент покупки авто с частичной сборки и еще в ряде других предсказуемых или спонтанных случаев может возникнуть острая необходимость купить пульт к машинке на радиоуправлении. Как не промахнуться с выбором, и каким особенностям следует уделить отдельное внимание? Именно об этом мы вам расскажем ниже!
Разновидности пультов ДУ
Аппаратура управления состоит из передатчика, с помощью которого моделист посылает команды управления и приемника, установленного на автомодели, который ловит сигнал, расшифровывает его и передает для дальнейшего выполнения исполнительными устройствами: сервомашинками, регуляторами. Именно так машинка едет, поворачивает, останавливается, стоит вам нажать на соответствующую кнопку или выполнить необходимую комбинацию действий на пульте.

Автомоделисты в основном пользуются передатчиками пистолетного типа, когда пульт удерживается в руке по типу пистолета. Под указательным пальцем размещается курок газа. При нажатии назад (к себе), машина едет, если надавить вперед – тормозит и останавливается. Если не прикладывать усилие, то курок будет возвращаться в нейтральное (среднее) положение. Сбоку на пульте расположено небольшое колесо – это не декоративный элемент, а самый главный инструмент управления! С его помощью выполняются все повороты. Вращение колесика по часовой стрелке поворачивает колеса вправо, против – направляет модель влево.
Есть еще передатчики джойстикового типа. Они держатся двумя руками, а управления производится правым и левым стиками. Но такой тип аппаратуры редкость для высококачественных авто. Их можно встретить на большинстве воздушной техники, и в редких случаях – на игрушечных радиоуправляемых машинках.
Поэтому с одним важным моментом, как подобрать пульт к радиоуправляемой машине мы уже разобрались – нам нужно ДУ пистолетного типа. Идем дальше.
На какие характеристики нужно обратить внимание при выборе
Несмотря на то, что в любом модельном магазине вы сможете выбрать как простую, бюджетную аппаратуру, так и очень многофункциональную, дорогостоящую, профессиональную, общими параметрами, на которые стоит обратить внимание, будут:
Связь между пультом для машины на радиоуправлении и приемником обеспечивается с помощью радиоволн, и главный показатель в данном случае – несущая частота. В последнее время моделисты активно переходят на передатчики с частотой 2.4 ГГц, так как она практически не уязвима перед помехами. Это позволяет в одном месте собирать большое количество радиоуправляемых авто и запускать их одновременно, в то время, как аппаратура с частотой 27 МГц или 40 МГц негативно реагирует на присутствие посторонних устройств. Радиосигналы могут перехлестываться и перебивать друг друга, из-за чего контроль над моделью пропадает.
Если вы решили купить пульт управления на радиоуправляемую машинку, вы наверняка обратите внимание на указание в описании количества каналов (2-канальный, 3CH и т. д.). Речь идет о каналах управления, каждый из которых отвечает за одно из действий модели.
Как правило, чтобы автомобиль ездил, достаточно двух каналов – работа двигателя (газ/тормоз) и направление движения (повороты). Можно встретить простые машинки-игрушки, у которых третий канал отвечает за дистанционное включение фар.
В навороченных профессиональных моделях третий канал для управления смесеобразованием в ДВС или для блокировки дифференциала.
Этот вопрос интересен многим новичкам. Достаточная дальность действия, чтобы вы могли комфортно себя чувствовать в просторном зале или на пересеченной местности – 100-150 метров, дальше машинка теряется из виду. Мощности современных передатчиков хватает, чтобы передавать команды на расстояние 200-300 метров.

Примером качественного, бюджетного пульта для машины на радиоуправлении является FlySky FS-GT3C. Это 3-канальная система, работающая в диапазоне 2.4ГГц. Третий канал дает больше возможностей для творчества моделиста и расширяет функциональные возможности авто, например, позволяет управлять светом фар или поворотниками. В памяти передатчика можно запрограммировать и сохранить настройки для 10 различных моделей авто!
Революционеры в мире радиоуправления – лучшие пульты для вашей машины
Применение систем телеметрии стало настоящей революцией в мире радиоуправляемых авто! Моделисту больше не нужно теряться в догадках о том, какую скорость развивает модель, какое напряжение у бортового аккумулятора, сколько топлива осталось в баке, до какой температуры прогрелся двигатель, сколько оборотов он совершает и т. д.
Главное отличие от обычной аппаратуры заключается в том, что сигнал передается в двух направления: от пилота к модели и от датчиков телеметрии на пульт.
Миниатюрные датчики позволяют в режиме реального времени мониторить состояние вашего авто. Необходимые данные могут выводиться на дисплей пульта дистанционного управления или на монитор ПК. Согласитесь, очень удобно всегда быть в курсе «внутреннего» состояния авто. Такая система легко интегрируется и просто настраивается.

Пример пульта «продвинутого» типа – Spektrum DX3R. Аппа работает по технологии «DSM2», которая обеспечивает максимально точный и быстрый отклик. К другим отличительным особенностям стоит отнести большой экран, на котором в графическом виде транслируются данные о настройках и состоянии модели. Spektrum DX3R считается самой быстрой среди аналогов и гарантированно приведет вас к победе!
В интернет-магазине Planeta Hobby вы без проблем подберете оборудование для управления моделей, сможете купить пульт управления на радиоуправляемую машинку и другую необходимую электронику: приемники, датчики телеметрии, сервоприводы и т. д. Делайте свой выбор правильно! Если не можете определиться самостоятельно, обращайтесь, с радостью поможем!